-
 产品介绍
产品介绍
 特色
特色 产品规格
产品规格 实物图片
实物图片 资源
资源
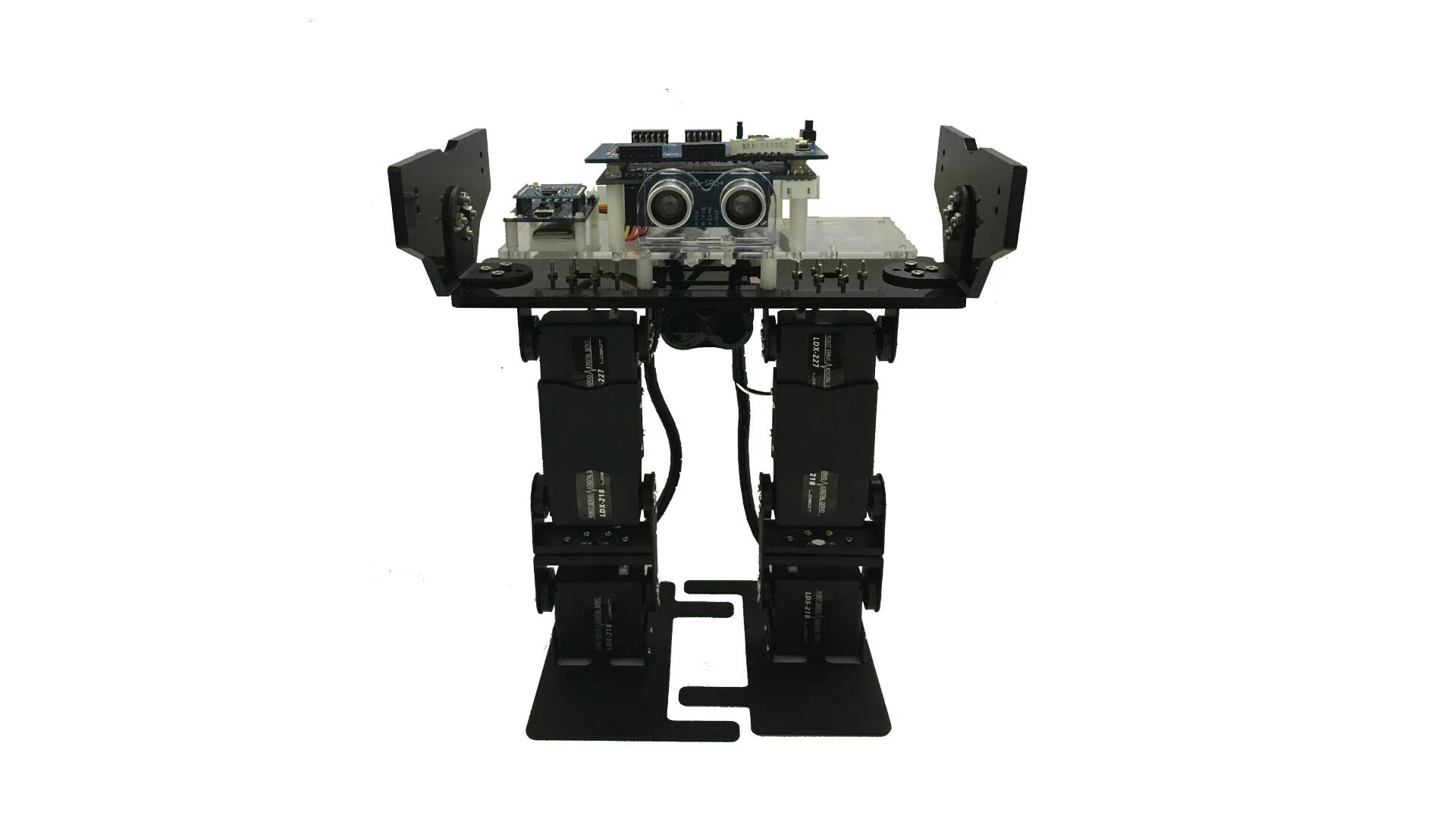
双足机器人工程套件是基于FPGA的类人型智能机器人学习套件,使用少量的舵机模仿双足直立运动控制系统,可作为类人型机器人的平衡与协同控制学习。同时结合智能视觉相机和语音识别模块、智能学习算法等可构建智能机器人系统。
控制板使用Xilinx FPGA核心板,可方便完成各类功能的定制化设计与重定制
留有足够空间可以加装各类控制器、传感器,如加装脚底传感器,进行步态检测,在腰间可搭载各种传感器和视觉识别系统,完成图像识别、追踪定位等功能
套件不仅适合学校教学研究,学生专题创作,让使用者充分享受机器人组装带来的乐趣,还可作为机器人二次开发的平台,参加各类机器人比赛
| 参数 | 描述 |
| FPGA |
|
| 存储 |
|
| 复位 |
|
| 网口&接口 |
|
| 用户I/O |
|
| 供电 |
|
| 舵机 |
|